
教师简介

张艳,江苏省妇女儿童活动中心培训活动部专职机器人教师。毕业于南京师范大学,硕士研究生学历,理学硕士学位,信息技术高级中学教师资格,高校讲师职称,通过国家软件工程师(中级)资格认证,国家数据库系统工程师(中级)资格认证。教学案例《“创新梦想 桥接未来”——桥文化创客教育活动》获得第三届长三角校外教育教师学术研讨活动教育教学基本功展示与交流二等奖,首届全国“儿童友好 智慧家园”亲子创客设计制作展选活动优秀指导教师。
随着自动驾驶等应用领域不断突破,以物体识别技术和环境感知技术等为代表的机器视觉技术成为人工智能的核心技术、全球智能的“慧眼”。本课程通过“智能的眼睛”学习,通过实现智能避障车型机器人的过程,学习超声波传感器是如何帮助机器人在行驶的过程中看到障碍物,并智能避障的。
一、教学目标
1、知识与技能:学生能够初步学习超声波传感器的功能和使用;能够在程序设计中熟练运用等待模块、切换模块。
2、过程与方法:能够将解决实际问题的方法转化为程序设计的流程图,体会模块化的思想与程序设计的基本方法。
3、情感态度与价值观:提高科技素养,激发创新精神、探究精神和团结协作精神。
二、重点难点
超声波传感器的使用
三、教学策略
本节课贯彻任务驱动的教学思想,让学生置身于自主探究解决问题的氛围中。通过创设情境引入新课,采用启发式教学法,调动学生探究兴趣,引导学生分析并画出避障小车流程图,进而亲自动手创作出一个个真实的作品。最后进行反思,进而改进。
四、教学过程
1. 联系
播放“无人驾驶智能汽车”视频、展示图片,进行兴趣导入,引入主题,确定本次课程的任务目标:设计实现智能避障小车。


2.构建
1. 认识超声波传感器
超声波传感器就像机器人的眼睛一样,可以测量前方物体与机器人之间的距离和识别障碍物。它的原理是超声传感器向正前方发射扇形的超声波,超声波遇到障碍时返回传感器,并依据返回的超声波判断距离障碍的距离。超声波传感器的测量范围是:0-255cm。

2. 安装超声波传感器
我们首先为避障小车安装上智能的眼睛——超声波传感器。请同学们按小组进行搭建,将超声波传感器安装在基础车型机器人的前方,将发射口一面朝前安装。这里要注意传感器的安装高度,不要安装的过高,否则会检测不到低处的障碍物。将传感器通过数据线连接到控制器的输入口4。

3. 算法与程序
接下来,我们来学习,如何控制机器人的眼睛,让避障小车通过超声波传感器看到障碍物。
任务1:避障小车前进的时候,如果遇到障碍物,小车停止。
提示知识:使用“等待模块”
程序1:开启“移动转向模块”机器人一直向前行驶,通过超声波来发现障碍物。将“等待模块”中选择超声波传感器,比较距离的碍物,关闭“移动转向模块”,机器人会停下。

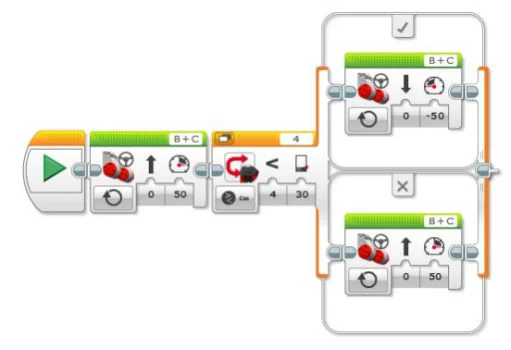
任务2:避障小车如何根据不同的障碍物距离做出不同的动作呢?如果没有探测到障碍物则继续前进,如果探测到,则后退返回。
提示知识:使用“切换模块”
程序2:修改程序1,开启“移动转向模块”机器人一直向前行驶,利用“切换模块”,对障碍物的距离进行判断,如果障碍物距离大于30厘米则开启“移动转向模块”继续前进,如果距离小于30厘米,则开启“移动转向模块”后退返回。
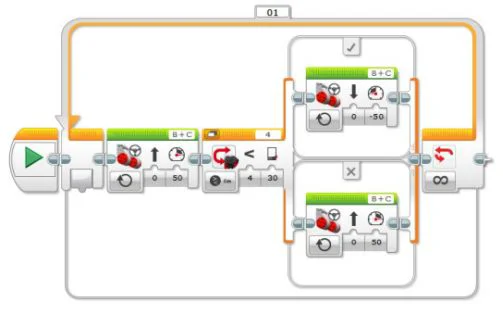
任务3:程序2只能实现一次距离判断,如何修改你的程序,让避障小车在行进的过程中不停的进行距离判断呢?
提示知识:使用“循环模块”
程序3:修改程序2,将程序2放入“循环模块”中,利用“循环模块”重复执行相同的动作,控制机器人不间断的进行距离检测,并作出相应的动作:距离大于30厘米则继续前进,距离小于30厘米则后退。
3.反思
(1)超声波传感器如果看不到前面的物体有哪些可能的原因?
(2)在动手实践中你遇到哪些困难,是如何解决的?
(3)评价你的作品,有哪些优点,哪些可以继续改进的地方?
4.延续
研究一下,现在完成的避障小车使用的超声波传感器只能看到前方的障碍物,如何让避障小车看到更大的区域?避障小车的实现还需要解决哪些问题,让小车更加智能的识别障碍物。




五、教学反思
本堂课的教学设计始终以启发引导、任务驱动和学生合作学习为着力点,注重学生解决问题能力的锻炼和编程思维的引导,教学的重难点都融入在避障小车的实现过程中。学生通过创作出智能避障小车,学习了灵活控制机器人的编程方法,学习的兴趣空前高涨,纷纷提出自己更新颖的设计思想,对后续课程的学习非常有利!